Este es posiblemente uno de los filtros más sencillos de implementar que hay. Su funcionamiento es similar al filtro de media móvil, pero solo tiene en cuenta el valor actual V y el anterior Vant. El filtro consiste en multiplicar Vant por un valor a y V por (1-a) y luego sumarlos.
V = ((1-a) * V) + (a * Vant)
Siendo a un valor entre 0 y 1. Cuanto mayor sea el valor de a mayor importancia se le dan a los valores anteriores, sería como aumentar la n, el número de muestras, del filtro de media móvil. Al igual que con la n, a mayor valor tenga a, mayor retardo se produce en la señal. Los valores habituales para a suelen oscilar entre 0,2 y 0,6.
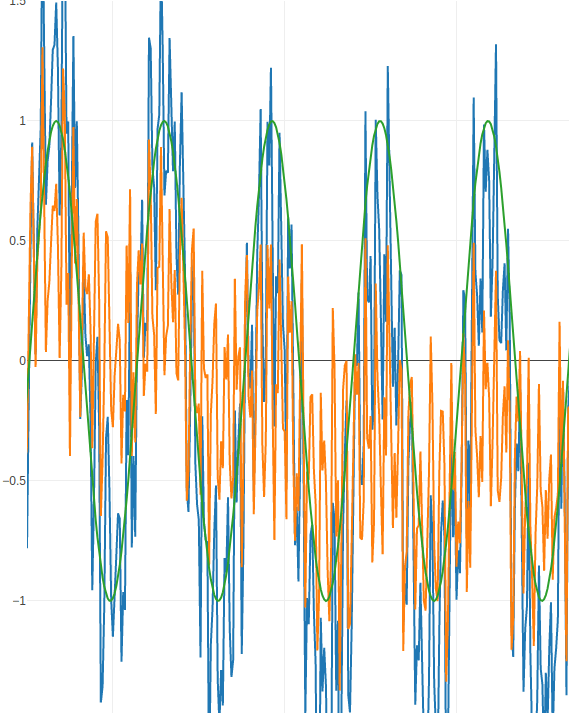
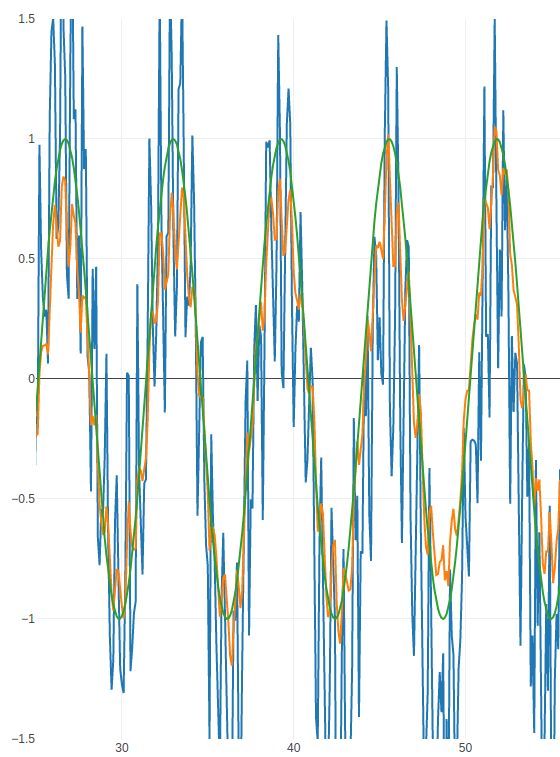
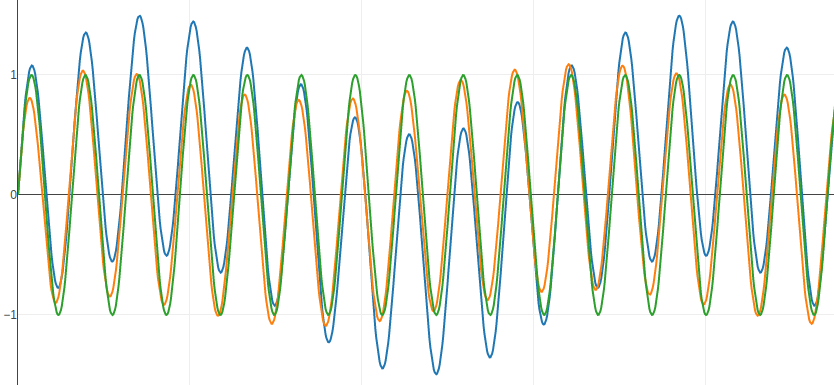
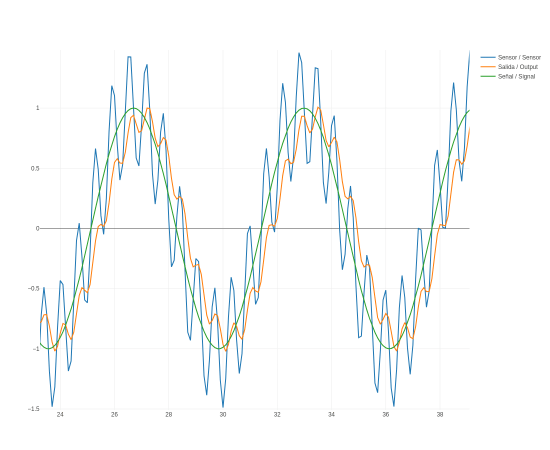
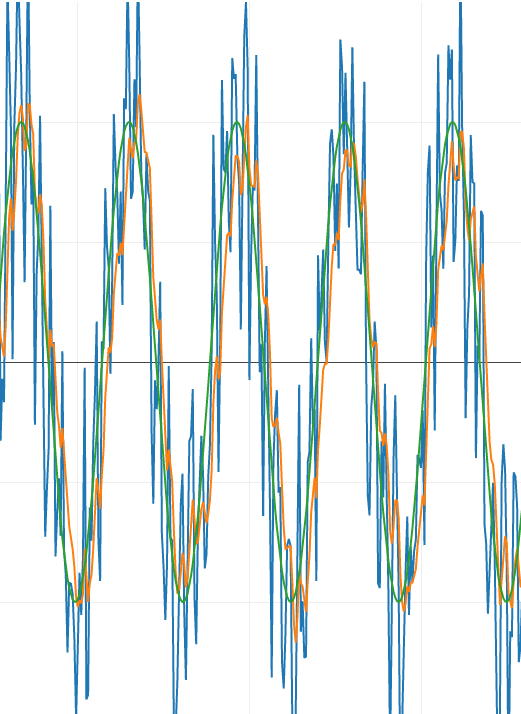
Veamos en nuestro simulador como usarlo para, partiendo de una señal sinusoidal (verde)a la que añadimos ruido (azul) la filtramos usando un filtro de media móvil (naranja):
Es un filtro simple, rápido y no requiere prácticamente recursos, pero hay un un caso especial que es computacionalmente aun más rápido. Cuando a vale 0,5, en ese caso el filtro se resume en:
V = (V + Vant) / 2
La división por dos se puede reemplazar por un desplazamiento a la derecha lo que permite usar números enteros. De esta forma el coste de aplicar este filtro es mínimo.