Un filtro paso alto es un filtro que fija una frecuencia de corte y deja pasar cualquier frecuencia superior a esa, mientras que atenúa frecuencias inferiores, Al menos esa es la teoría, en la realidad «el corte» no es tan limpio y se ven afectadas otras frecuencias. En realidad la frecuencia de corte e inferiores no sufren una caída completa a cero si no una gran atenuación.
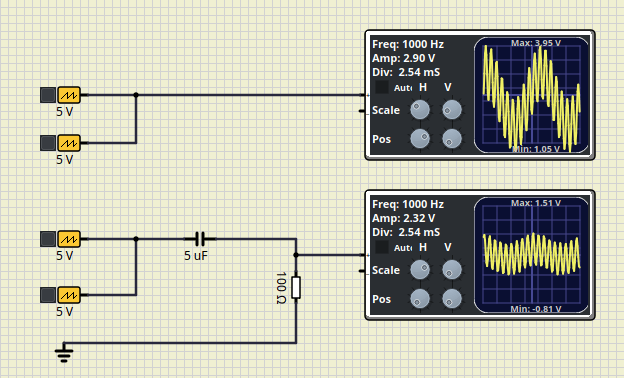
En electrónica el modelo más sencillo de filtro paso alto es un filtro RC usando una resistencia y un condensador. En la imagen inferior se puede ver como montarla y como afecta a una señal ruidosa reduciendo el ruido de baja frecuencia, dejando solo la señal de alta frecuencia.
Para realizar nuestro filtro paso bajo por software vamos a modelar matemáticamente el filtro RC.
double a = RC / (RC + dt);
output[t] = a * (output[t-1] + sensor[t] - sensor[t-1]);
Donde:
- dt – Es el tiempo, en sg, entre las muestras t-1 y t
- RC – Resistencia * Capacidad del condensador
- output[t] – Es la señal filtrada en el momento t.
- sensor[t] – Es la entrada sin filtrar en el momento t.
RC en nuestro caso es un valor numérico que emula el comportamiento Para calcular RC partiremos de la frecuencia de corte «fc» que deseemos en Herzios:
RC = 1 / (2 * Pi * fc)
Tras esta visión general vamos a los detalles.
Cuando t = 0 se puede usar como output:
output[0] = sensor[0]
Si no necesitamos guardar los valores no hace falta que usemos un array, podemos usar una sola variable output que almacena el valor del resultado anterior:
output = a * (output + sensor[t] – sensor[t-1]);
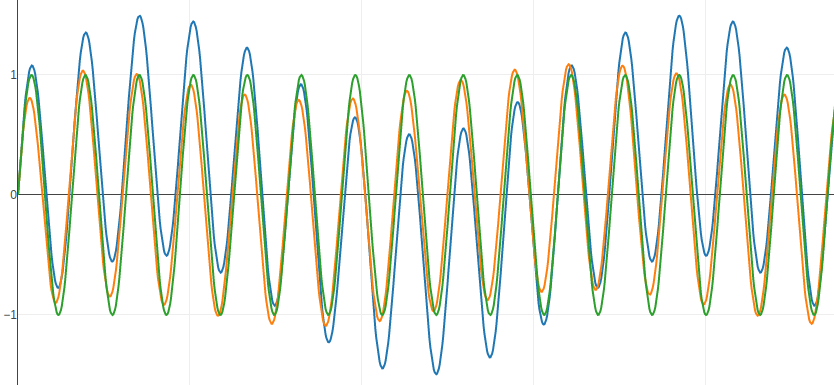
Veamos un ejemplo de señal (verde) sinusoidal sometida a ruido de baja frecuencia (azul) que la hace oscilar y filtrada usando un filtro de paso bajo (naranja):
Puedes probar aquí un simulador que cree para mostrar como funcionan los diferentes filtros.
Puedes ver esta misma explicación para filtros de paso bajo.



